

更新日:2014,06,26,Thursday 更新者:ezawa
広報委員会が書く記事が多くなかなか
今日は開発についてです。
弊社の
馴れない人には「どうしてこんなに短く作ったんだ
可能な限り短く作ろうと思ったというのがそもそもの開発コンセプトです。
ガイドが当たる側が長い場合は整列させるのはそれほど難しくありません。
問題はハガキ短い側揃えの様な場合です。
普通のアライナーですと90度変針してしまいます・・・。
特許は出願しませんでしたが、意匠で登録されています。
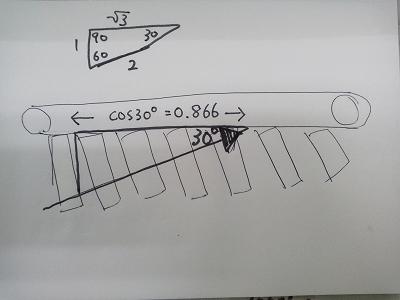
で悩んだのが傾斜ローラーの角度を何度にしようということです。コレが決まれば壁の速度をどのくらいの速度にするかが決まります。
そこで出てくるのが高校の時に勉強した三角関数ですね。
傾斜ローラーの角度が決まれば自ずとガイドの速度が決定します。
たとえば正三角形を頂点から半分にした三角形は30度60度90度で作られる三角形ですが、この辺の長さは小学校で習ったとおり1:2:.√3です。
コレを参考にすれば傾き30度と大変きつい角度の傾斜ローラーの場合は、2が傾斜ローラーの長さに相当するので、ガイドの長さは√3になります。
従ってcosθ=√3となり、1.732となります。
まぁ、実際には理論値ではうまくいかないです・・ということも付け加えておきます。
色々とテストを行い、最適な速度を設定しています。
最初期のアライナーは傾斜ローラーの角度と速度、ガイドの速度と全てが調整できる仕様になっていましたからモーターだけで5台積んでいました。
懐かしいです。
| http://www.ezawajimuki.com/blog/index.php?e=526 |
| ブログ::開発 | 01:34 PM |
| ブログ::開発 | 01:34 PM |